TAREA MATLAB
Contents
Ejercicio1
Ejercicio 1 apartado a)
Función factorial recursiva
type factr
function f = factr(n)
if n == 0
f = 1;
else
f = n * factr(n-1);
end
Ejercicio 1 apartado b)
Función de combina
type combina
function t = combina(n,i) t=(factr(n))/((factr(i))*(factr(n-i))); end
Ejercicio 1 apartado c)
Función de bernstein
type bernstein
function polbernstein = bernstein(n,i,t); %n es el grado del polinomio %i, orden del polinomio que va de 0,n %t, parámetro a elegir que está en el intervalo [0,1] polbernstein=(combina(n,i))*(t.^i).*((1-t).^(n-i)); end
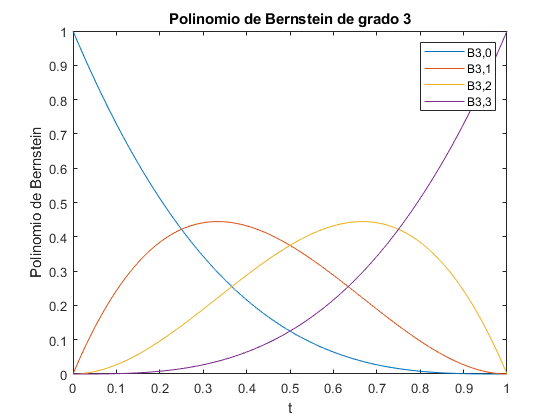
Ejercicio 1 apartado c)
Desarrollar una función que use la función bernstein y vectorización para dibujar en la misma gráfica los polinomios de bernstein de grado 3.
t=linspace(0,1); n=3; figure(8) for i=0:n b=bernstein(n,i,t); figure(1) plot(t,b) hold on; end xlabel('t'); ylabel('Polinomio de Bernstein'); title('Polinomio de Bernstein de grado 3'); legend('B3,0','B3,1','B3,2','B3,3'); hold off
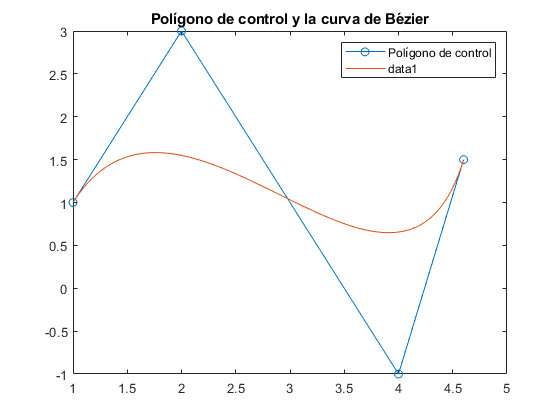
Ejercicio 1 apartado d)
Desarrollar un programa para graficar el polígono de control y la curva de Bézier
figure(10) t=linspace(0,1); V=[1 2 4 4.6;1 3 -1 1.5]; plot(V(1,:),V(2,:),'-o') n=size(V); n=n(2); s=size(t); x=zeros(n,s(2)); y=zeros(n,s(2)); for i=1:n x(i,:)=bernstein(n-1,i-1,t)*V(1,i); y(i,:)=bernstein(n-1,i-1,t)*V(2,i); end a=sum(x); b=sum(y); title('Polígono de control y la curva de Bézier'); legend('Polígono de control','Curva de Bézier'); hold on; plot(a,b);
Warning: Ignoring extra legend entries.
Ejercicio 2
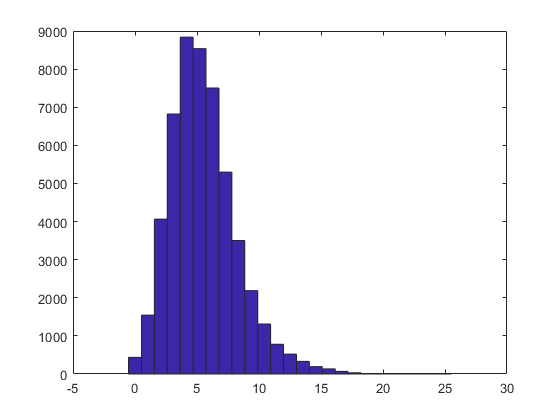
Ejercicio 2 apartado a)
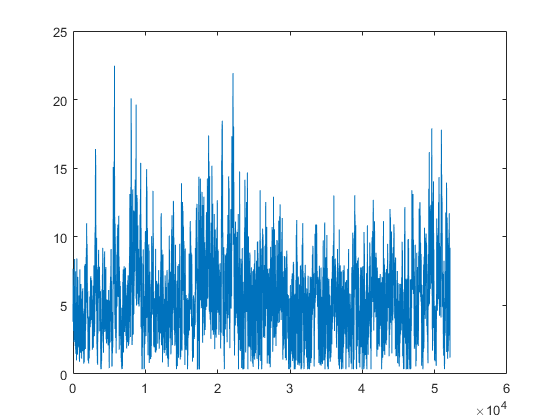
Lectura de los datos de velocidad del viento y gráfica el historia considerando intervalos de clase [0,25]
dw=xlsread('sotaventogaliciaanual.xlsx');
nbins=linspace(0,25,25);
figure(1)
hist(dw,nbins)
figure(2)
plot(dw)
clear,clc
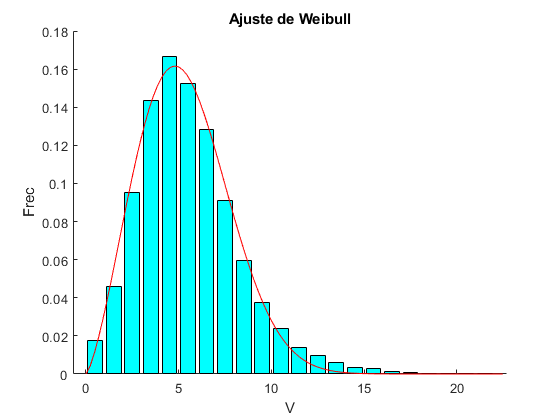
Ejercicio 2 apartado b)
Conversión de los datos del viento a un histograma de frecuencias y Ajuste a una distribución de Weibull, graficar ambas cosas
Y=xlsread('sotaventogaliciaanual.xlsx','B:B'); x=0.5:1:max(Y); viento=hist(Y,x); frec=viento/sum(viento); f=@(a,x) (a(1)/a(2))*((x/a(2)).^(a(1)-1)).*exp(-(x/a(2)).^a(1)); k=std(Y); c=mean(Y); a0=[k c]; %condiciones iniciales af=nlinfit(x,frec,f,a0); figure(3) hold on % Para el diagrama de frecuencias bar(x,frec,'c'); % Ajuste x=linspace(0,max(Y),100); y=f(af,x); plot(x,y,'r') title('Ajuste de Weibull') xlabel('V') ylabel('Frec') hold off
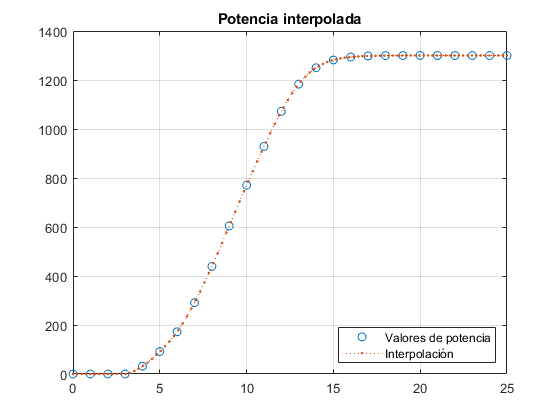
Ejercicio 2 apartado c)
Grafica de los puntos de la curva y los valores de la interpolación.
X=xlsread('sotavento_curva potencia.xlsx','A:A'); Y=xlsread('sotavento_curva potencia.xlsx','B:B'); figure(4) x25=linspace(0,25); v25 = interp1(X,Y,x25,'pchip'); plot(X,Y,'o',x25,v25,':.'); title('Potencia interpolada') legend('Valores de potencia','Interpolación','Location','southeast'); grid on
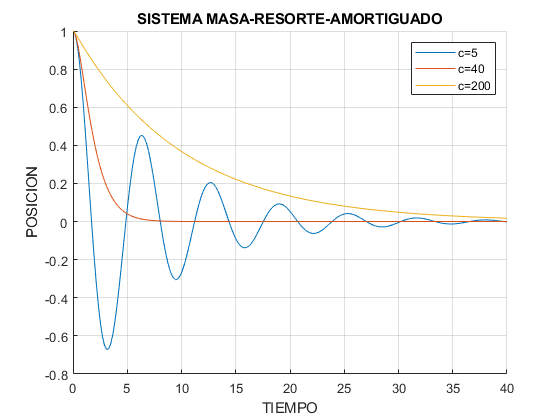
Ejercicio 3
Grafica en una misma gráfica del desplazamiento en función del tiempo para cada uno de los valores del coeficiente de amortiguamiento. El movimiento de un sistema masa-resorte-amortiguador se describe por una ecuación diferencial
%Datos figure(6) clear all, clc m=20; k=20; c=[5 40 200]; %CONDICIONES INICIALES x0=[1,0]; tf=40; hold on for i=1:3 f=@(t,x) [x(2);(-c(i)*x(2)-k*x(1))/m]; [t,x]=ode45(f,[0,tf],x0); plot(t,x(:,1)) end grid on xlabel('TIEMPO') ylabel('POSICION'); legend('c=5','c=40','c=200') title('SISTEMA MASA-RESORTE-AMORTIGUADO')
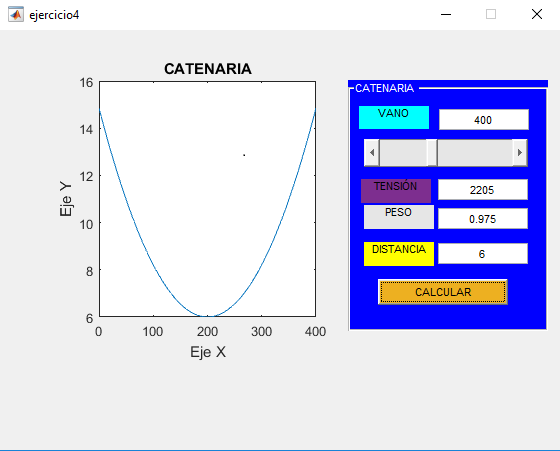
Ejercicio 4